10 MICRON - Precizie fara compromisuri
de
baader-planetarium.com
Astrofotografie și urmărire la nivel profesional – fără autoghidaj
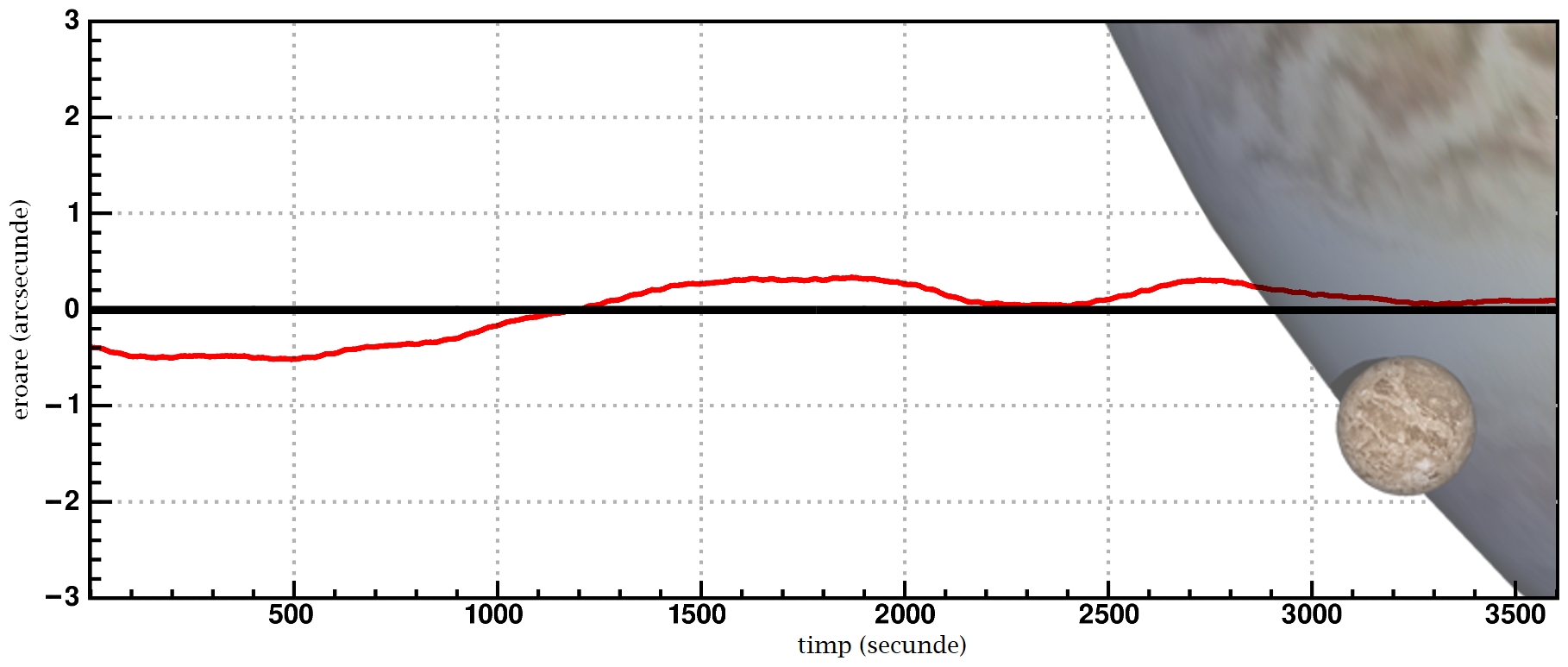
Profilul erorii de urmărire, măsurat cu un encoder cuplat la axa A.R. Jupiter și Ganimede sunt prezentate așa cum se văd de pe Pământ, la aceeași scară.
| DE CE 10MICRON? | | AVANTAJELE TALE ÎN PRACTICĂ |
|---|
| Encodoare absolute pe ambele axe – montura nu își pierde poziția nici după o pană de curent sau mișcare manuală. |
➡️ |
Economie de timp – fără configurare de ghidaj, fără depanare. Mai mult timp pentru achiziția efectivă de date. |
| Urmărire bazată pe model – precizie maximă pe întregul cer (model de poziționare automatizat). |
➡️ |
Expuneri lungi fără autoghidaj – precizie de urmărire de până la ±0,5". |
| Funcționare stand-alone – computer integrat și controler manual. |
➡️ |
De la portabilitate maximă la operare la distanță – ideală pentru observatoare remote, călătorii și utilizare pe teren. |
| Complet pregătită pentru observator – potrivită pentru amatori, profesioniști și aplicații științifice. |
➡️ |
Sateliți, comete și alte obiecte – urmărire directă și automată fără software suplimentar, fără laptop. |

MAI MULT TIMP PENTRU ASTROFOTOGRAFIE. MAI PUȚIN TIMP PENTRU TEHNOLOGIE.
ACEASTA ESTE DIFERENȚA 10MICRON.
| CRITERIU | MONTURI 10MICRON | MONTURI STRAINWAVE |
|---|
| Principiu de urmărire / Sistem de encodere |
Encodere absolute de înaltă rezoluție pe ambele axe |
Urmărire și ghidaj fără feedback pozițional real |
| Precizie de urmărire |
Până la ±0,5" |
±10" (±3,0" cu encoder) |
| Precizie de măsurare (Encoder) |
Encodere absolute 20–24 bit (pe axe și motoare)
➡️>10 milioane poziții/rotație ➡️măsurare directă a poziției axei și comparare cu valorile encoderelor motoarelor |
Encoder doar pe axa RA (de obicei cu integrare mai redusă) ➡️ măsoară mișcarea, nu poziția reală a axei |
| Eroare periodică (PE) |
Lină, modelabilă |
Rapidă, neliniară |
| Autoghidaj |
Nu este necesar, dar este posibil |
Obligatoriu |
| Comportament la corecții |
Urmărire pe două axe cu corecție în timp real (bazată pe encoder) |
Corecție doar indirectă prin ghidaj |
| Operare stand-alone |
Complet utilizabilă fără laptop |
Necesită de obicei software extern |
| Moduri de urmărire |
Urmărire integrată pentru sateliți, comete și obiecte non-sidereale |
Adesea posibilă doar cu software extern |
| Efort de configurare |
O singură configurare a modelului, apoi reproducibil |
Necesită optimizare continuă a ghidajului |
| Siguranța poziției |
Își cunoaște mereu poziția (chiar și după pană de curent) |
Posibilitate de pierdere a poziției |
| Beneficiu practic |
Mai mult timp pentru imagistică, mai puține surse de eroare |
Mai mult efort la setup, complexitate mai mare |
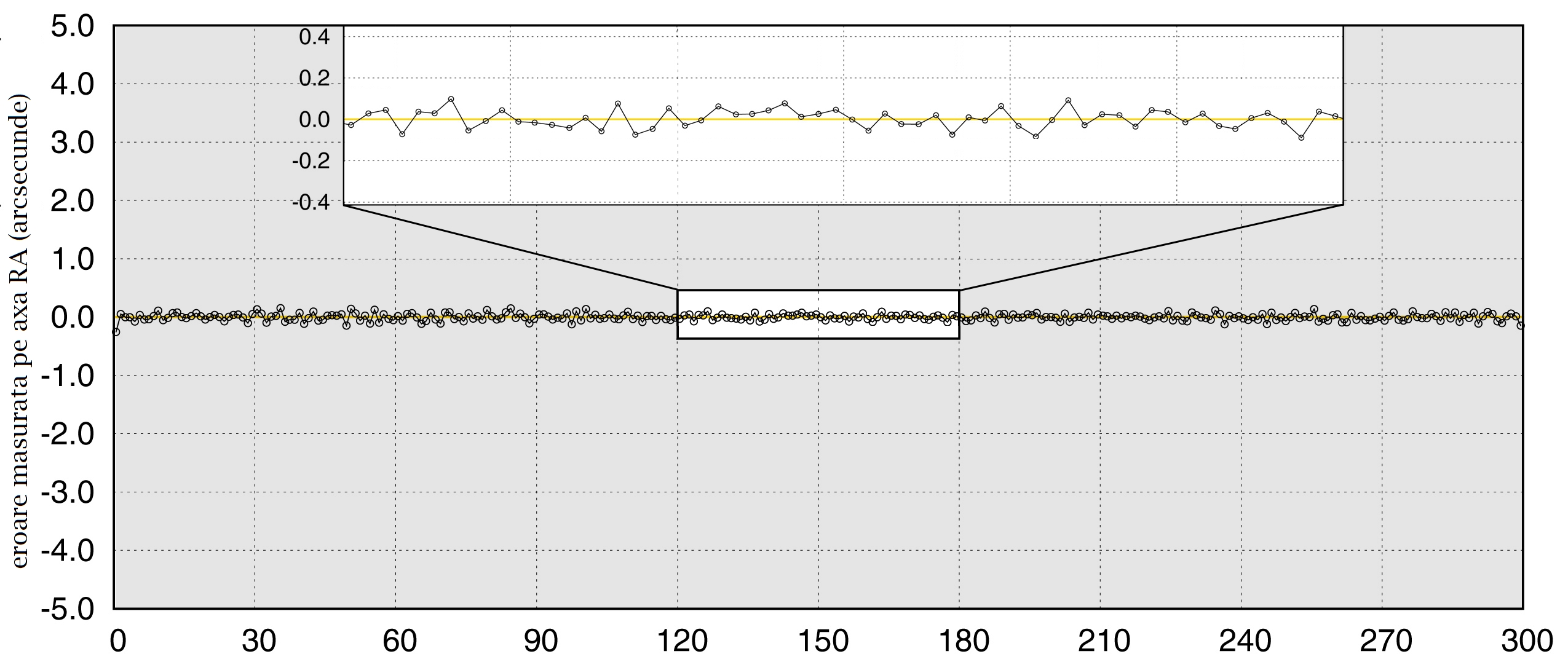
300 de secunde de urmărire fără autoghidaj cu GM4000 HPS II, curbă de eroare măsurată cu un encoder de înaltă rezoluție.








